
Kopidlnka, tedy trať Kopidlno – Dolní Bousov, se postupně proměňuje v experimentální dráhu. Společnost AŽD zde totiž začala testovat systémy pro autonomní provoz vlaků bez strojvedoucích na širé trati.
Vlak bez strojvedoucího jede poklidnou krajinou, když vtom se za obloukem na železničním přejezdu objeví porouchaný terénní automobil a kousek od něj mává zoufalý řidič, který z vozidla stačil vyskočit. Vlak nejdříve mírně zpomalí a po chvíli bezpečně zastaví před přejezdem.

Toto je přesný popis jedné z testovacích jízd na měřicím voze ETCS 851.026-5 společnosti AŽD, při nichž se nejen ověřuje spolehlivost jednotlivých technologií pro autonomní provoz vlaků na širé trati, ale slouží také pro sběr potřebných dat z kamer a dalších senzorů instalovaných na čele vozidla. Z těch se neuronové sítě učí co nejlépe rozpoznávat objekty v jejich zorném poli.
Získané informace jsou neustále posílány k vyhodnocení do výpočetního a řídicího modulu, který pošle pokyny již existující technologii AŽD ATO (Automatic Train Operation – Automatické vedení vlaku). Ta v běžném provozu umí vlak po souhlasu strojvedoucího sama rozjet a poté ho spolehlivě zastaví v následující stanici. Za bezpečnost v rámci autonomního provozu zůstává odpovědný systém ETCS (Evropský jednotný vlakový zabezpečovač).
Rozdílné typy senzorů
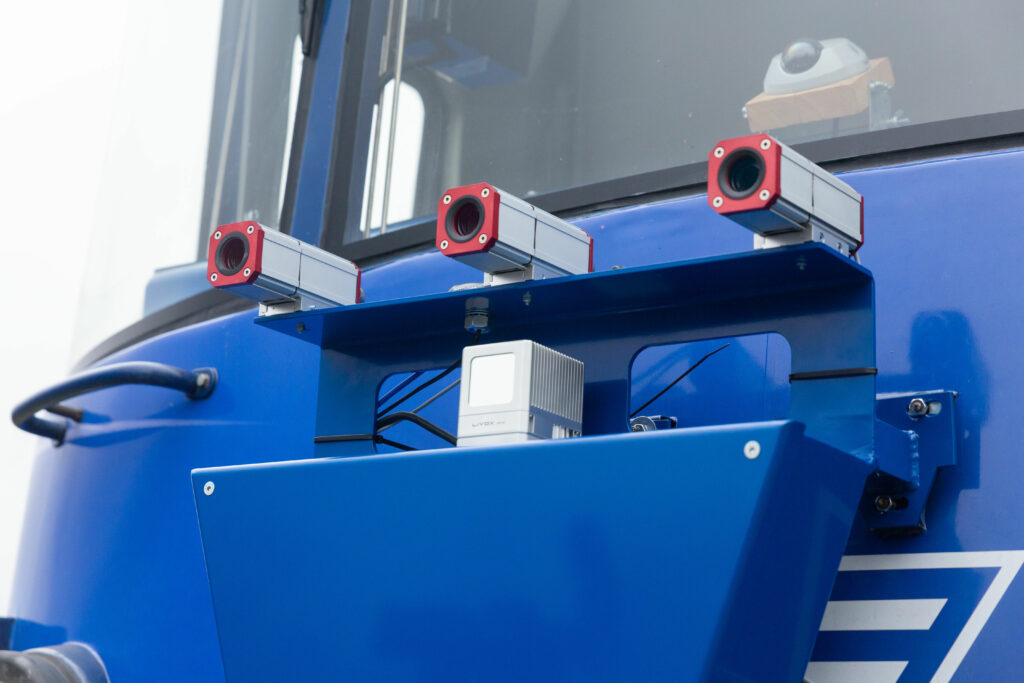
Vývoj započal průzkumem možností jednotlivých technologií pro detekci překážek a pracemi na prvním tzv. proof of concept řešení, což zahrnovalo i první testování na trati. Prostor před vlakem sleduje detektor objektů, který nahrazuje oči strojvedoucího. Použití více rozdílných typů senzorů umožňuje pokrýt monitorovaný prostor před vlakem. Některé senzory sice mají daleký dosah, ale nepostřehnou to, co se děje těsně u vlaku, a naopak. Vhodná skladba těchto senzorů a mnoho dalších technických aspektů je předmětem podrobného zkoumání a testování.
„Detektor objektů se aktuálně skládá z Lidaru, který modeluje 3D scény prostoru pomocí laserových paprsků, dále ze stereokamery sestavující hloubkovou mapu na základě perspektivního složení pohledů dvou kamer, nechybí ani termokamera k zobrazování infračerveného teplotního vyzařování objektů a HD kamera pro zpracování klasického obrazu s vysokým rozlišením. Systém se dále skládá z návazných zařízení, jako jsou GNSS modul (GPS a GALILEO), řídicí elektronika, výpočetní moduly pro zpracování senzorických dat a obrazu interpretující viděné scény včetně hledání objektů a potenciálních překážek a v neposlední řadě expertní rozhodovací modul (náhrada rozhodování strojvedoucího),“ popisuje použité technologie vedoucí projektu autonomního vlaku Vítězslav Landsfeld ze společnosti AŽD.
Každý senzor ze své technologické podstaty vnímá okolí z vlastní perspektivy. Již dnes jsou tedy zachycovány také informace nad rámec současného vidění oka strojvedoucího. Odborníci z AŽD dokonce pracují na senzorech, které umožní „vidět“ vlaku takzvaně za roh. Těmito senzory se plánují osadit riziková místa podél trati, nástupiště, vstupy do tunelů či úseky za oblouky, přičemž data z těchto senzorů budou kontinuálně přenášena do rozhodovacích modulů. „Systém musí každou sekundu zpracovat neuvěřitelné množství dat ze všech senzorů. Aktuálně se jedná zhruba o 1,5 GB/s, což pro představu činí miliony informací za sekundu,“ vysvětluje Vítězslav Landsfeld.
Budoucnost: vlak bez strojvedoucího
Když společnost AŽD v roce 2018 zveřejnila vizi o autonomních vlacích bez strojvedoucích na širé trati, rozvířila se divoká diskuse, v níž řada lidí pochybovala, že by železnice mohla jít tímto směrem. „A proč by to nebylo možné? Když se začalo hovořit o bezpilotních dronech, také tomu nikdo nevěřil, a dnes už existují. Aktuálně se testují autonomní automobily, tak proč by nemohly být autonomní vlaky na širé trati. Vždyť je to jednodušší než automobil. Minimálně v tom, že u vlaku se přesně ví, kudy pojede a co jej na trati čeká. Já věřím tomu, že jednou vlak bez strojvedoucího na širé trati budeme běžně potkávat,“ říká generální ředitel společnosti AŽD Zdeněk Chrdle s vědomím, že železniční provoz je oproti tomu silničnímu v některých aspektech mnohem komplexnější, systémově propracovanější a svázaný všemožnými předpisy. Zásadním problémem je také mnohem větší hybný moment. Zatímco automobil zabrzdí na pár metrech, u vlaku jsou to stovky metrů.
Tvůrci systémů pro autonomní provoz vlaků myslí i na situace, kdy těsně před vozidlo vběhne zvěř, spadne strom při vichřici anebo vjede nepozorný řidič, a přestože systémy ihned zareagují, vlak nedobrzdí. „Vzniká tak mimořádná událost a o dalším postupu musí rozhodnout supervizor na dohledovém pracovišti. My aktuálně systém takového dohledového pracoviště pro autonomní provoz vlaků vyvíjíme. Reportovány budou různorodé incidenty, a to s patřičnou prioritou. Pracovník dohledu potom může situaci vzdáleně přes kamery prověřit, informovat cestující a provést potřebné kroky, například přivolat složky Integrovaného záchranného systému, předat informace správci infrastruktury, převzít dálkové ovládání anebo obnovit automatický provoz vlaku. Supervizor si informace, zvuk či obraz z příslušného vlaku může samozřejmě vyžádat kdykoliv během jízdy, i když se nic neděje. Také cestující se budou moci kdykoliv během jízdy spojit s dohledovým pracovištěm,“ uzavírá Vítězslav Landsfeld.



{kind=link}